Domain Driven Design example
Let's create an API controlling a Plane able to:
- fly a plane
- land it
- change its position
- track all past positions for the current or previous journey
For such simple needs, a CRUD API would suffice but for the sake of learning we will use domain driven design, event-sourcing and cqrs.
Code can be found at: github.com/aurelien-clu/example-ddd-es/rust-cqrs
Event storming
Event storming is a workshop-based method to quickly find out what is happening in the domain of a software program. Compared to other methods it is extremely lightweight and intentionally requires no support by a computer. The result is expressed in sticky notes on a wide wall.
We will follow the following steps:
- Collect domain events
- Refine domain events
- Track causes
- Find aggregates
We end up with the following:
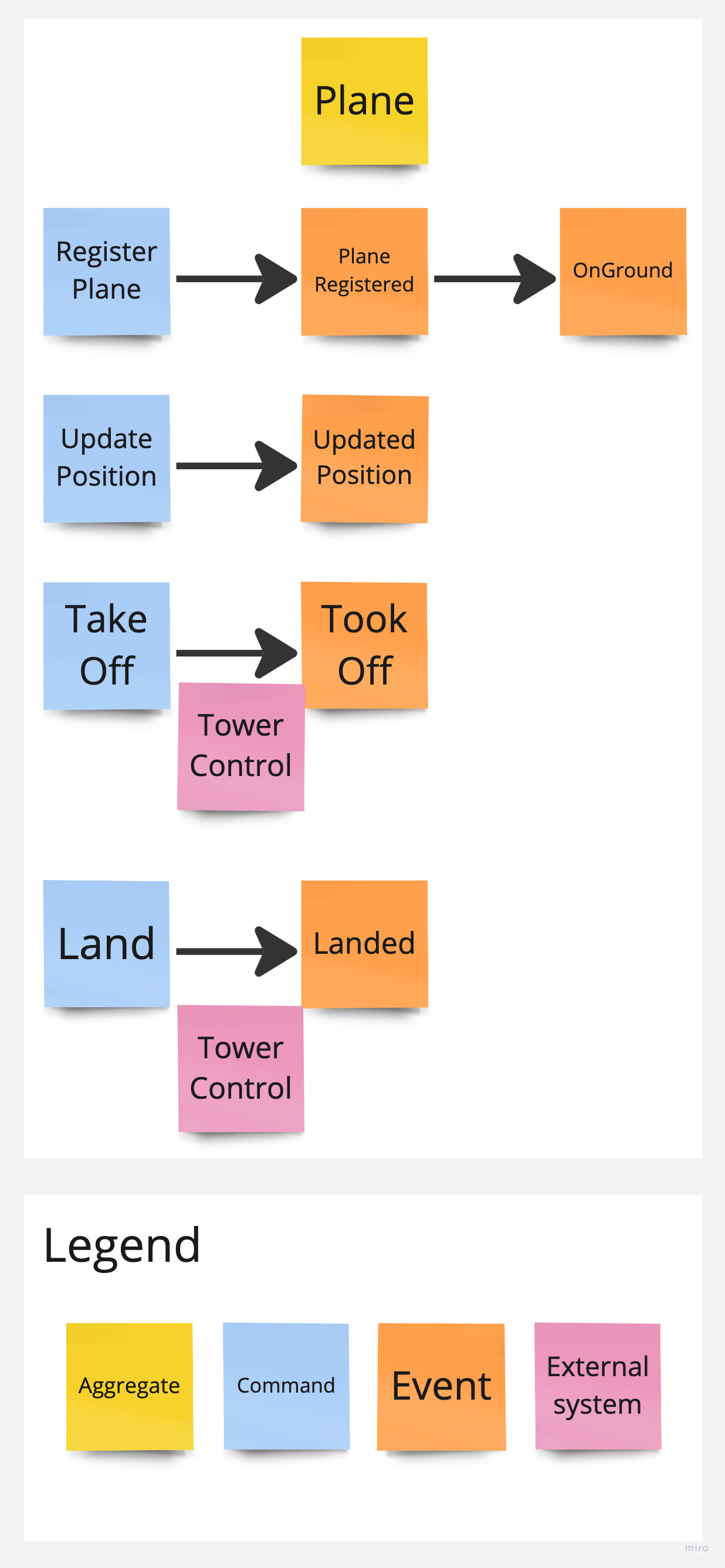
Graph made using: miro.com/miroverse/event-storming/
Notes:
- Event storming should be done with domain experts, I am no expert in aviation, thus this is incomplete but sufficient for this example :)
- OnGround event is not necessarily following PlaneRegistered but happens at the same time. It makes more sense to have an event describing that the plane is on ground without knowing whether the plane has flew before or not while registering (an alternative could be to default a plane to be on ground and remove OnGround event).
Let's code it
Below you will find code samples, full code can be found here: github.com/aurelien-clu/example-ddd-es/rust-cqrs.
Which library?
We want a rust library to help us with DDD, event-sourcing & CQRS. github.com/serverlesstechnology/cqrs fits our needs.
Reasons to use it:
- great documentation: doc.rust-cqrs.org/
- ease of use
Reasons not to use it:
- aggregate ids have to be
Strings, we could want to useUUID - maybe less feature complete than github.com/get-eventually/eventually-rs
- not
wasmif you have reasons to need this, then go with github.com/thalo-rs/thalo
Setup
.
├── Cargo.toml
├── crates
│ ├── domain-plane
│ └── server
├── db
│ └── init.sql
├── docker-compose.yml
└── test
└── test_api_plane.sh
We need to have a crate for our plane domain and another for our server.
By separating domain from server (and other infrastructure concerns we adhere to wikipedia.org/Hexagonal architecture)
Cargo.toml
[workspace]
members = ["crates/*"]
crates/
cargo new crates/domain-plane --lib
cargo new crates/server
docker-compose.yml
To store our events and our queries (views on our aggregate) we will need a database, github.com/serverlesstechnology/cqrs works with PostgreSQL & few other databases. PostgreSQL being my go to database, we will use it. (it is also the one in the demo project, let's keep it simple)
version: '3.1'
services:
cqrs-postgres-db:
image: postgres
restart: always
ports:
- 5432:5432
environment:
POSTGRES_DB: demo
POSTGRES_USER: demo_user
POSTGRES_PASSWORD: demo_pass
volumes:
- './db:/docker-entrypoint-initdb.d'
db/init.sql
We need to store our events and create a database user:
CREATE TABLE events
(
aggregate_type text NOT NULL,
aggregate_id text NOT NULL,
sequence bigint CHECK (sequence >= 0) NOT NULL,
event_type text NOT NULL,
event_version text NOT NULL,
payload json NOT NULL,
metadata json NOT NULL,
PRIMARY KEY (aggregate_type, aggregate_id, sequence)
);
CREATE USER demo_user WITH ENCRYPTED PASSWORD 'demo_pass';
GRANT ALL PRIVILEGES ON DATABASE postgres TO demo_user;
Events
From our event storming session, we need to have the following events:
use serde::{Deserialize, Serialize};
#[derive(Debug, Clone, Serialize, Deserialize, PartialEq)]
pub enum Event {
Registered { registration_id: String },
OnGround,
TookOff,
Landed,
PositionedAt {
latitude: f64,
longitude: f64,
altitude: usize,
},
}
they will be serialized as json in the database (column payload) thus we need to make them serializable.
Commands
And also the following commands:
use serde::Deserialize;
#[derive(Debug, Deserialize)]
pub enum Command {
Register {
registration_id: String,
},
UpdatePosition {
latitude: f64,
longitude: f64,
altitude: usize,
},
TakeOff,
Land,
}
They will be Deserialized from http queries, so it is not needed by our domain-plane crate but will be useful by the server crate.
Errors
Commands may not always return successfully, and some errors can be expected and returned.
We create an enum with all possible errors and define a message associated to each (#[error("<MSG>")]).
Usually this will be updated while implementing the aggregate. To fasten the reading, here are all of our error cases.
#[derive(thiserror::Error, Clone, Debug, PartialEq)]
pub enum Error {
#[error("Unable to take off in curent state")]
CannotTakeOff,
#[error("Unable to land in current state")]
CannotLand,
#[error("Cannot register again, identification is immutable")]
AlreadyRegistered,
}
Note: docs.rs/thiserror/latest/thiserror/ reduces the boilerplate around error definitions.
Aggregate
State
Let's define our Plane state. We want it to have:
- an identification (relating to its domain -> wikipedia.org/Aircraft_registration)
- a last known position
- a flying status
#[derive(Serialize, Deserialize, Debug, Clone, PartialEq)]
pub struct Position {
pub latitude: f64,
pub longitude: f64,
pub altitude: usize,
}
#[derive(Serialize, Deserialize, Default, Debug, Clone, PartialEq)]
pub enum Status {
#[default]
OnGround,
InAir,
}
#[derive(Serialize, Deserialize)]
pub struct Plane {
registration_id: String,
last_position: Option<Position>,
status: Status,
}
impl Default for Plane {
fn default() -> Self {
Self {
registration_id: "".to_string(),
last_position: None,
status: OnGround,
}
}
}
We then need to be able to build a Plane state based on past events:
fn apply(&mut self, event: Self::Event) {
match event {
Event::Registered { registration_id } => self.registration_id = registration_id,
Event::PositionedAt {
latitude,
longitude,
altitude,
} => {
let p = Position {
latitude,
longitude,
altitude,
};
self.last_position = Some(p);
}
Event::TookOff => self.status = Status::InAir,
Event::Landed => self.status = Status::OnGround,
Event::OnGround => self.status = Status::OnGround,
}
}
Command handler
We have a Plane that can be constructed with past events but we have no way of creating events.
That where the handle function comes in, it will translate successful commands into events:
async fn handle(
&self,
command: Self::Command,
_services: &Self::Services,
) -> Result<Vec<Self::Event>, Self::Error> {
match command {
Command::Register { registration_id } => {
if self.registration_id != "" {
return Err(Error::AlreadyRegistered);
}
Ok(vec![Event::Registered { registration_id }, Event::OnGround])
}
Command::UpdatePosition {
latitude,
longitude,
altitude,
} => Ok(vec![Event::PositionedAt {
// here we should validate that coordinates are valid
latitude,
longitude,
altitude,
}]),
Command::TakeOff => {
if self.status == Status::OnGround {
// here we should call the TowerControl service to ensure we can takeoff
Ok(vec![Event::TookOff])
} else {
Err(Error::CannotTakeOff)
}
}
Command::Land => {
if self.status == Status::InAir {
// here we should call the TowerControl service to ensure we can land
Ok(vec![Event::Landed])
} else {
Err(Error::CannotLand)
}
}
}
}
rust-cqrs/crates/domain-plane/src/domain/aggregate.rs
Services
Our aggregate Plane can do some things on its own but for others it should be working with a Control Tower service.
In this example, we are not going to implement a "real" or a mocked version.
Know that we could define a trait within the domain-plane crate and have a svc-tower-control crate, for instance, implementing the trait. It would for instance ensure that no other planes are currently landing or departing whenever a plane asks to land or take off.
Services may be covered in future post, stay tuned!
Tests
How to ensure that everything is working properly? Let's test the aggregate with the following:
- a plane can be registered
- a plane can update its position
- a plane can take off if it is on ground
- a plane can land if it is airborne
- a plane cannot land if already on ground
- a plane cannot take off if already airborne
- a plane cannot register once it is registered
Example of a test, following wikipedia.org/Behavior driven development:
#[test]
fn test_a_plane_should_land() {
let past = vec![
Event::Registered {
registration_id: "F-TEST".to_string(),
},
Event::OnGround,
Event::TookOff,
];
let command = Command::Land;
let expected = vec![Event::Landed];
let services = ();
PlaneTestFramework::with(services)
.given(past)
.when(command)
.then_expect_events(expected);
}
rust-cqrs/crates/domain-plane/src/domain/tests.rs
We verify everything works as expected with:
cargo test
Queries
track for the current or previous journey, all past positions
With Command Query Responsibility Segregation (CQRS) we should access past events with a "Query".
With our chosen library this means that we build a query over past event for our aggregate and as events happen, we will update the state of our query.
Our CurrentJourneyView will track in its state the past positions so we don't need to access directly the event log whenever we want this information, we will look up our new query table (cf below).
#[derive(Debug, Default, Serialize, Deserialize)]
pub struct CurrentJourneyView {
registration_id: String,
status: Status,
positions: Vec<Position>,
}
pub type CurrentJourneyQuery =
GenericQuery<PostgresViewRepository<CurrentJourneyView, Plane>, CurrentJourneyView, Plane>;
impl View<Plane> for CurrentJourneyView {
fn update(&mut self, event: &EventEnvelope<Plane>) {
match &event.payload {
Event::Registered { registration_id } => self.registration_id = registration_id.clone(),
Event::OnGround => self.status = Status::OnGround,
Event::TookOff => {
self.status = Status::InAir;
self.positions.clear();
}
Event::Landed => self.status = Status::OnGround,
Event::PositionedAt {
latitude,
longitude,
altitude,
} => self.positions.push(Position {
latitude: *latitude,
longitude: *longitude,
altitude: *altitude,
}),
}
}
}
rust-cqrs/crates/domain-plane/src/queries/current_journey.rs
Let's update the init.sql with our new query:
CREATE TABLE plane_current_journey_query
(
view_id text NOT NULL,
version bigint CHECK (version >= 0) NOT NULL,
payload json NOT NULL,
PRIMARY KEY (view_id)
);
Server
Let's use github.com/tokio-rs/axum for our server:
#[tokio::main]
async fn main() {
let pool = default_postgress_pool("postgresql://demo_user:demo_pass@localhost:5432/demo").await;
// we setup and get ownership of our aggregate and query
let (cqrs, current_journey_query) = domain_plane::config::cqrs_framework(pool);
let router = Router::new()
.route(
"/plane/:registration_id",
get(routes::plane::query_handler).post(routes::plane::command_handler),
)
// we use axum extensions to provide:
.layer(Extension(cqrs)) // - our aggregate to our command_handler
.layer(Extension(current_journey_query)); // - our current_journey_query to our query_handler
axum::Server::bind(&"0.0.0.0:3030".parse().unwrap())
.serve(router.into_make_service())
.await
.unwrap();
}
rust-cqrs/crates/server/src/main.rs
Queries
We lookup our query for the given registration_id and return the response as json or an error.
pub async fn query_handler(
Path(registration_id): Path<String>,
Extension(view_repo): Extension<Arc<PostgresViewRepository<CurrentJourneyView, Plane>>>,
) -> Response {
let view = match view_repo.load(®istration_id).await {
Ok(view) => view,
Err(err) => {
return (StatusCode::INTERNAL_SERVER_ERROR, err.to_string()).into_response();
}
};
match view {
None => StatusCode::NOT_FOUND.into_response(),
Some(account_view) => (StatusCode::OK, Json(account_view)).into_response(),
}
}
Commands
We receive a command as json and apply it to the aggregate matching the registration_id.
Commands don't return data (cf CQRS) but a simple 204 NO CONTENT successful response or an error.
pub async fn command_handler(
Path(registration_id): Path<String>,
Extension(cqrs): Extension<Arc<PostgresCqrs<Plane>>>,
MetadataExtension(metadata): MetadataExtension,
Json(command): Json<Command>,
) -> Response {
match cqrs
.execute_with_metadata(®istration_id, command, metadata)
.await
{
Ok(_) => StatusCode::NO_CONTENT.into_response(),
Err(err) => (StatusCode::BAD_REQUEST, err.to_string()).into_response(),
}
}
Tests
Let's see if our API works properly!
RANDOM=$$
TEST_ACCT="test-plane-$RANDOM"
TEST_URL="localhost:3030/plane/$TEST_ACCT"
echo "***************************"
echo "* Plane: $TEST_ACCT"
echo "***************************"
echo "Registering plane"
curl --location --request POST $TEST_URL --header 'Content-Type: application/json' --data-raw "{\"Register\": {\"registration_id\": \"$TEST_ACCT\"}}"
echo -e "\nUpdating position"
curl --location --request POST $TEST_URL --header 'Content-Type: application/json' --data-raw "{\"UpdatePosition\": {\"latitude\": 1.0, \"longitude\": 2.0, \"altitude\": 0 }}"
# [...]
rust-cqrs/test/test_api_plane.sh
# terminal 1
docker-compose up -d
cargo run
# terminal 2
./test/test_api_plane.sh
Expected terminal 1 output
rust-cqrs/crates/domain-plane/src/queries/logger.rs logs every Plane events, useful for debugging.
Format:
id: '{{Aggregate ID}}', sequence: {{Event number for the given aggregate}}
{{event as a JSON unless the event contains no data (e.g. "OnGround")}}
******************************************************
id: 'test-plane-27355', sequence: 1
{
"Registered": {
"registration_id": "test-plane-27355"
}
}
******************************************************
id: 'test-plane-27355', sequence: 2
"OnGround"
******************************************************
id: 'test-plane-27355', sequence: 3
{
"PositionedAt": {
"latitude": 1.0,
"longitude": 2.0,
"altitude": 0
}
}
******************************************************
id: 'test-plane-27355', sequence: 4
"TookOff"
******************************************************
id: 'test-plane-27355', sequence: 5
{
"PositionedAt": {
"latitude": 10.0,
"longitude": 20.0,
"altitude": 10
}
}
******************************************************
id: 'test-plane-27355', sequence: 6
{
"PositionedAt": {
"latitude": 11.0,
"longitude": 21.0,
"altitude": 20
}
}
******************************************************
id: 'test-plane-27355', sequence: 7
"Landed"
Expected terminal 2 output
The journey shows the plane's status and the current or last journey positions (history is cleared upon take off)
***************************
* Plane: test-plane-27355
***************************
Registering plane
Updating position
Prepare for take off!
Updating position
Journey
{"registration_id":"test-plane-27355","status":"InAir","positions":[{"latitude":10.0,"longitude":20.0,"altitude":10}]}
Updating position
Prepare for usual landing!
Journey
{"registration_id":"test-plane-27355","status":"OnGround","positions":[{"latitude":10.0,"longitude":20.0,"altitude":10},{"latitude":11.0,"longitude":21.0,"altitude":20}]}